
Il Politecnico offre la possibilità alla comunità studentesca, nel corso della carriera formativa, di partecipare alle attività dei Team studenteschi.
Si lavora per l’ideazione di un progetto che, portato avanti parallelamente agli impegni di studio, non solo consente di accrescere le proprie competenze culturali, tecniche e manageriali, ma è anche un eccezionale strumento di aggregazione studentesca e sociale.
Studentesse e studenti, grazie a queste attività, accettano la sfida di cimentarsi in un progetto dando esempio di creatività, voglia di realizzare ed entusiasmo: alla crescita formativa si abbina quella personale.
I gruppi sono molto eterogenei non solo per l’appartenenza a corsi di studio differenti ma anche per i numerosi paesi di provenienza: in questo modo si può contare su una pluralità di competenze e conoscenze che, amalgamandosi, rappresentano un valore aggiunto alla progettualità.



I Team attivi
Il Team 2WheelsPoliTO nasce nel 2009 come gruppo multidisciplinare di studenti del Politecnico di Torino che partecipa alla MotoStudent International Competition. Il Team progetta, realizza e testa due moto: una alimentata a e-fuel e una con propulsione elettrica, con l'obiettivo di raggiungere la massima prestazione e competere per la vittoria. Con dedizione, competenze tecniche e lavoro di squadra, il Team punta a eccellere in pista e a spingere i limiti della tecnologia motociclistica.
Team leader: MARCO BIAGINI
Referente: LORENZO PERONI
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team A.K.A.NOAH guarda a un futuro più sostenibile, con particolare attenzione all'impatto delle plastiche che si utilizzano ogni giorno. Le microplastiche che queste rilasciano non solo inquinano l'ambiente, ma possono avere effetti dannosi anche sulla salute. Per questo il Team lavora su divulgazione, tecnologia e innovazione per affrontare il problema alla radice.
Team leader: NATALIA GIOVANNA FLORIO
Referente: ELENA COMINO
Dipartimento: DIP. ING. DELL'AMBIENTE,DEL TERR. E DELLE INFR.
Il Team ASTRA è un Team Studentesco che si propone di sviluppare dei concept di componenti per una base lunare funzionante e indipendente. "Disegnare una base lunare" significa costituire un intero sistema di componenti che tra di loro collaborano al fine di garantire la vita su altri pianeti: dalla progettazione di abitazioni, allo studio del riutilizzo e riciclo delle risorse e dell'energia, sino all'uso di robot che possano svolgere compiti in parallelo alla presenza umana.
Team leader: PIETRO SANTONI
Referente: STEFANO MAURO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
BitPolito è un Team Studentesco del Politecnico di Torino con la missione di creare un ponte tra il mondo accademico e l'industria Bitcoin. Il Team contribuisce a progetti open-source del settore, organizza eventi e corsi di formazione, partecipa a concorsi e conferenze internazionali, oltre a pubblicare contenuti informativi. Attualmente, BitPolito conta circa 50 membri attivi e più di 200 alumni negli anni, di cui circa il 10% lavora oggi in aziende in primo piano nel panorama Bitcoin.
Team leader: LUCA VISCONTI
Referente: DANILO BAZZANELLA
Dipartimento: DIPARTIMENTO DI SCIENZE MATEMATICHE
ColoriTO è un Team Studentesco del Politecnico di Torino nato con l'idea di "disegnare la città attorno a noi" attraverso l'arte e la progettualità condivisa. Il progetto di Urbanismo Tattico in San Pietro in Vincoli ha l'obiettivo di rigenerare l'area urbana e culturale attraverso opere grafiche, interventi artistici e recuperare alcuni elementi d'arredo.
Team leader: MIRIAM MUSSONE
Referente: PIA DAVICO
Dipartimento: DIPARTIMENTO DI ARCHITETTURA E DESIGN
Il Team, nato nel 2020, partecipa ad eventi di competitive programming, ovvero gare in cui vengono proposti problemi di natura logico-matematica da risolvere mediante algoritmi da implementare in determinati linguaggi di programmazione. ICPC-SWERC, International Collegiate Programming Contest - Southwestern Europe Regional Contest (swerc.eu), è l'obiettivo principale del Team, in quanto è la più antica e ambita competizione di programmazione a livello universitario.
Team leader: ISMAELE BAHATI
Referente: STEFANO QUER
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
Il Team ConcreToPrint si propone di progettare e costruire una stampante 3D direzionale portatile per elementi in calcestruzzo. Con questa vuole realizzare piccoli manufatti e travi da testare in laboratorio per comprenderne le caratteristiche meccaniche, utilizzando calcestruzzi innovativi (per esempio con fibre). La ricerca proseguirà con il tentativo di implementare un sistema che inserisca un'armatura metallica contestualmente alla stampa.
Team leader: LORENZO CONTE
Referente: ALESSANDRO PASQUALE FANTILLI
Dipartimento: DIPART. DI ING. STRUTTURALE, EDILE E GEOTECNICA
Il gruppo corale dell'Ateneo riunisce studenti e docenti di tutti i Corsi di Studio. Propone attività di musica d'insieme, con prove a cadenza settimanale e concerti. Il nome evidenzia lo spirito multietnico sia nella composizione del Team sia nel repertorio musicale affrontato.
Team leader: ALESSIA LIFONSO
Referente: MAURO GASPARINI
Dipartimento: DIPARTIMENTO DI SCIENZE MATEMATICHE
Il CubeSat PoliTO Team è un team studentesco fondato nel 2008, impegnato nel design e sviluppo di piccole piattaforme satellitari. Il Team ha lanciato in orbita due Cubesat: E-ST@R-I e E-ST@R-II, nel 2012 e 2016. Oggi il team sta progettando ELECTRA, CubeSat 3U con l'obiettivo di studiare la Ionosfera e testare un micro-propulsore. Il team è supportato dal programma ESA FYS!-Design Booster 2. La missione sarà operata tramite C3, la Ground Station sviluppata dal Team.
Team leader: ALEKSANDR STORACE
Referente: SABRINA CORPINO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team si basa sulla collaborazione tra umani e AI, per lo sviluppo di prodotti audiovisivi che colleghino i mezzi del cinema tradizionale con quelli del futuro. In particolare, realizza cortometraggi e mediometraggi di alta qualità e con una forte componente creativa, data dalle infinite possibilità delle nuove tecnologie.
Team leader: MATTEO SIPIONE
Referente: TANIA CERQUITELLI
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
Il Team DIANA ha lo scopo di portare la robotica per lo spazio all'interno del Politecnico di Torino tramite la ricerca e la realizzazione di modelli terrestri di rover messi in campo nelle Rover Challenge Series Competitions. Il Team è un incubatore di talenti: gli/le studenti sviluppano conoscenze avanzate di robotica ed automazione e sono messi alla prova nel gestire un progetto complesso e articolato maturando capacità altamente professionalizzanti.
Team leader: STEFANO GIULIANELLI
Referente: FABRIZIO STESINA
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
DigiTwin Monitoring sviluppa gemelli digitali aggiornati in tempo reale per la gestione del patrimonio costruito, integrando monitoraggio strutturale e ambientale, modellazione BIM e data analysis. Le attività includono installazione e calibrazione dei sensori, sviluppo di interfacce user-friendly, validazione dei modelli e divulgazione dei risultati, puntando a sicurezza, efficienza e manutenzione predittiva. Collabora con laboratori e aziende e promuove formazione pratica e multidisciplinare.
Team leader: MATTEO ROSSETTI
Referente: FRANCESCO TONDOLO
Dipartimento: DIPART. DI ING. STRUTTURALE, EDILE E GEOTECNICA
Il progetto 2026 del Team DIRECT consolida la formazione continua di studenti "crisis mapper" capaci di applicare tecniche avanzate di geomatica (rilievo 3D, droni, fotogrammetria, telerilevamento, GIS/WebGIS, mobile mapping, ROV/USV) in tutte le fasi del disaster management. L'obiettivo è acquisire, integrare ed elaborare dati territoriali e sul patrimonio per attività di rapid mapping e tutela ambientale e culturale.
Team leader: MATTEO BALZANO
Referente: FILIBERTO CHIABRANDO
Dipartimento: DIPARTIMENTO DI ARCHITETTURA E DESIGN
Il DRones For Autonomous Flight Team (DRAFT) sviluppa prototipi di droni a guida autonoma, al passo con le tecnologie innovative prodotte nel mondo della robotica nell'ultimo decennio. Il Team si focalizza sulla partecipazione a competizioni che prevedono lo sviluppo di un drone e un rover a guida autonoma per l'esplorazione di aree ignote e senza segnale GPS.
Team leader: GIUSEPPE ITTA
Referente: ELISA CAPELLO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
EcòPoli è un team studentesco che dal 2017 si occupa di tematiche ambientali, realizzando progetti incentrati sulla sostenibilità e attività di sensibilizzazione. Nasce come una costola del Green Team, con il quale collaboriamo per portare avanti iniziative di interesse comune.
Team leader: FLAVIO BIDOLLI
Referente: TONIA TOMMASI
Dipartimento: DIPARTIMENTO SCIENZA APPLICATA E TECNOLOGIA
Il Team si occupa della progettazione, realizzazione e caratterizzazione di rotori eolici per la produzione di energia elettrica. La multidisciplinarietà dello studio vede coinvolti studenti di diversi Corsi di Studio che fanno capo a tematiche inerenti alla fluidodinamica, all'energia elettrica, alla meccanica, alle strutture, al controllo e alla gestione. La disponibilità all'interno del dipartimento di attrezzature, strumentazioni, stampanti 3D, software per il calcolo computazionale e di gallerie del vento ha già consentito di mettere a punto una prima metodologia per il progetto e la caratterizzazione di rotori inerenti al segmento del micro eolico. Info e aggiornamenti @EolitoTeam @eolito_team
Team leader: ARIA MANSOURI
Referente: GIOACCHINO CAFIERO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
FlyTOFuture è un team di studenti dedicato alla progettazione di un dirigibile autonomo a idrogeno con propulsione solare, sviluppato per competere nella World Solar Airship Race. Il progetto affronta temi cruciali come la sostenibilità ambientale e l'efficienza energetica, sfruttando tecnologie avanzate per ridurre l'impatto ambientale del trasporto aereo. FlyTO Future contribuisce concretamente all'innovazione verso una mobilità più sostenibile e sicura.
Team leader: FRANCESCO CAVALLARO
Referente: CARLO GIOVANNI FERRO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
GEMS PoliTo è un gruppo di studenti del Politecnico di Torino, uniti da un forte interesse comune verso la geologia e le georisorse. L'obiettivo è la cura, la gestione e l'espansione della collezione geologica del DIATI (Dipartimento di Ingegneria dell'Ambiente, del Territorio e delle Infrastrutture), attraverso attività di laboratorio e indagini sul campo nel territorio italiano.
Team leader: GUALTIERO GATTINO
Referente: ADRIANO FIORUCCI
Dipartimento: DIP. ING. DELL'AMBIENTE,DEL TERR. E DELLE INFR.
H2-EDGE è un team studentesco multidisciplinare che esplora l'uso dell'idrogeno nella propulsione aeronautica per ridurre il carbon footprint. Si concentra sulla combustione diretta dell'idrogeno in motori a turbina a gas. Studenti di diverse discipline ingegneristiche collaborano in progettazione, simulazione e test di tecnologie abilitanti, sviluppando competenze trasversali e creando un network di partner accademici e industriali per sensibilizzare sulla sostenibilità nel settore aeronautico.
Team leader: FEDERICA SALEMI
Referente: DARIO GIUSEPPE PASTRONE
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Team Studentesco per la realizzazione di veicoli a basso consumo (a fuel cell, elettrici o ibridi) per la partecipazione alla Shell Eco-marathon, competizione internazionale in cui vince chi consuma di meno e non chi arriva primo.
Team leader: PIETRO CASARANO
Referente: MASSIMILIANA CARELLO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Hideout PoliTO è il primo team social del Politecnico di Torino gestito da studenti. Racconta l'ingegneria e l'architettura con la voce di chi le studia, coinvolgendo direttamente gli altri team studenteschi. Le candidature sono sempre aperte: il team accoglie studenti da ogni corso di studi, offrendo loro l'opportunità di crescere, contribuire con le proprie competenze e imparare sul campo lavorando all'interno di troupes dai ruoli dinamici.
Team leader: GIULIA BERGAMIN
Referente: GUIDO SARACCO
Dipartimento: DIPARTIMENTO SCIENZA APPLICATA E TECNOLOGIA
Il Team si occupa della progettazione e realizzazione di velivoli unmanned, sviluppati per raggiungere obiettivi specifici attraverso l'impiego di sistemi innovativi appositamente progettati. Lavorando in gruppo e partecipando a competizioni universitarie internazionali, gli studenti hanno l'opportunità di confrontarsi con le sfide tipiche del settore aerospaziale, acquisendo competenze tecniche e trasversali fondamentali per il loro futuro professionale.
Team leader: ANGELO ROMANO
Referente: PAOLO MAGGIORE
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team ISAAC del Politecnico di Torino opera nella robotica mobile di servizio con focus sulle operazioni di ricerca e soccorso (SAR). Sviluppa soluzioni innovative come Rese.Q, un robot modulare biomimetico progettato per supportare o sostituire i soccorritori in scenari critici. Partecipa alla RoboCup Rescue, promuovendo innovazione, formazione e sicurezza in ambito robotico.
Team leader: LUCA DE PAOLA
Referente: GIUSEPPE QUAGLIA
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il team Ker(PoliTo) ha come obiettivo quello della divulgazione della Matematica, che non è solo il linguaggio base di tutte le ingegnerie e scienze, ma una disciplina con infinite sfaccettature e applicazioni. Lo scopo del team è mettere in risalto questo concetto tramite eventi dal vivo e tramite l'utilizzo dei profili social, con contenuti online adatti ad ogni tipologia di platea. Partecipa a competizioni internazionali e organizza sessioni di preparazione aperte alla comunità politecnica.
Team leader: KRISTIAN DOCI
Referente: FRANCESCA MARIA CERAGIOLI
Dipartimento: DIPARTIMENTO DI SCIENZE MATEMATICHE
Level Up Lab è un Team Studentesco del Politecnico di Torino che ha come obiettivo lo sviluppo di videogiochi. "Level Up" è un'espressione tratta dal gergo videoludico che esprime l'ottenimento di nuove abilità o il miglioramento di alcune qualità. Il Team vuole creare un laboratorio che permetta agli studenti di passare al livello successivo affrontando insieme le sfide che li separano dai loro sogni.
Team leader: DANIELE GALATI
Referente: FRANCESCO STRADA
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
MALTO (Machine Learning at PoliTO) è il primo Team Studentesco del Politecnico di Torino interamente dedicato al Machine Learning e al Deep Learning. Fondato nel 2023 e guidato da dottorandi e ricercatori, riunisce studenti appassionati di AI e innovazione. Il Team partecipa a competizioni internazionali nei più importanti congressi del settore e organizza eventi per favorire la creazione di una vivace comunità studentesca interessata alla Data Science e alle tecnologie emergenti.
Team leader: EVREN AYBERK MUNIS
Referente: FLAVIO GIOBERGIA
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
Il Team Mi Lego al Territorio progetta e realizza modelli in LEGO con lo scopo di informare sui rischi derivanti da fenomeni naturali in modo interattivo. Per mostrare gli effetti del dissesto idrogeologico è stato costruito un modello di bacino idrografico in scala ridotta ed è stata creata una piattaforma vibrante capace di simulare un sisma. In diverse occasioni il team ha preso parte a ad expo del mattoncino in diverse regioni d'Italia ed eventi organizzati da enti come Protezione Civile.
Team leader: DENIZ ANDAC
Referente: PIERLUIGI CLAPS
Dipartimento: DIP. ING. DELL'AMBIENTE,DEL TERR. E DELLE INFR.
Il team Osiris sviluppa uno studio di fattibilità per una missione di raccolta e trasporto di detriti spaziali verso la Luna per il loro riciclo. Il progetto include design di missione, realizzazione di mock-up e prototipi robotici di ADR, in collaborazione con PoliSpace. Obiettivo: contribuire alla sostenibilità spaziale con un approccio interdisciplinare e interuniversitario.
Team leader: ANDREA DE MOLA
Referente: LORENZO CASALINO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
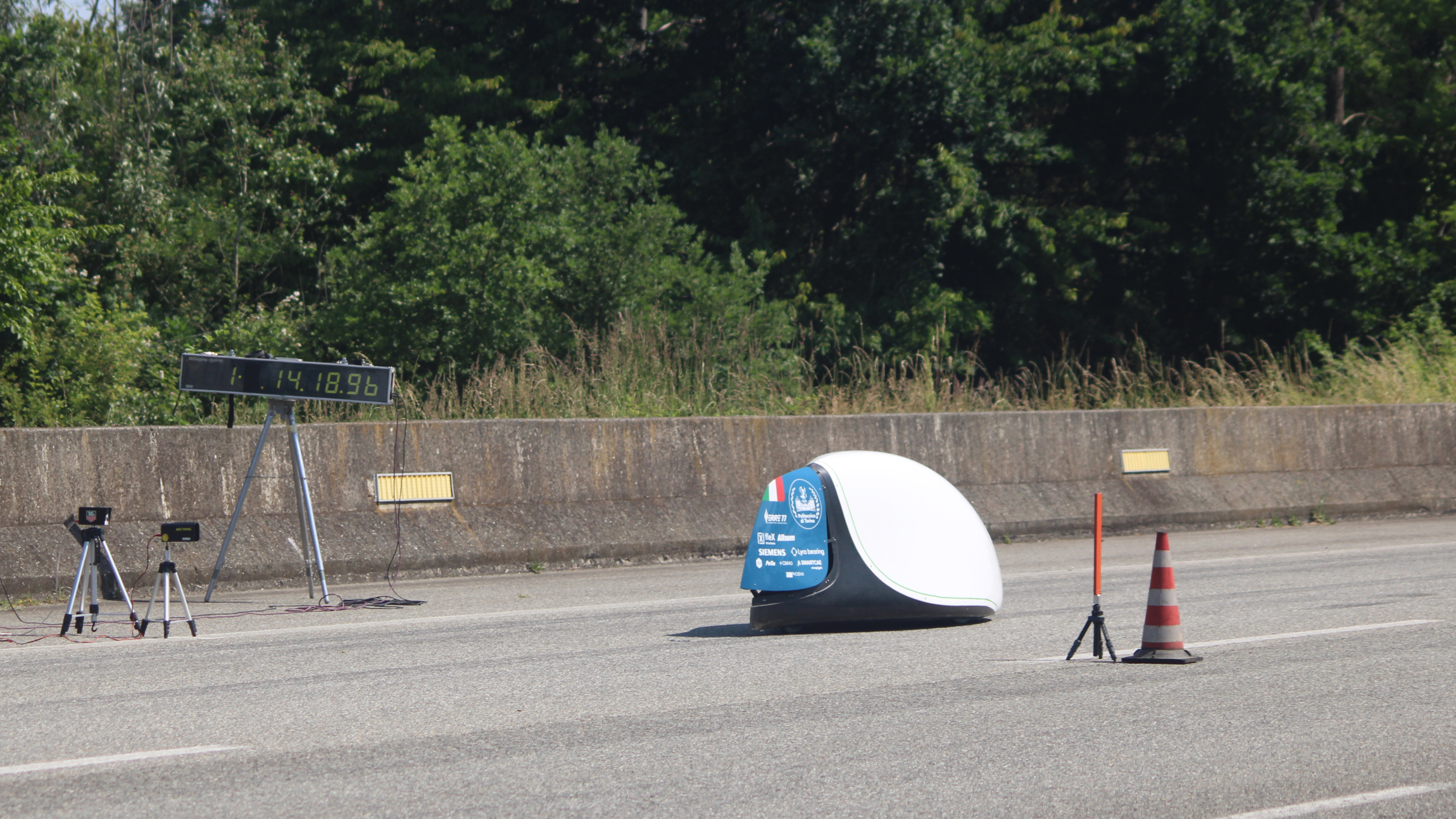
Nato nel 2009, Policumbent ha l'obiettivo di progettare e costruire i veicoli a propulsione umana più veloci al mondo, concentrandosi sull'estremizzazione aerodinamica e meccanica dei prototipi. Il Team detiene il Record del Mondo di velocità per un veicolo "arm-powered" con il prototipo "Cerberus", avendo raggiunto gli 83,28 km/h; mentre per la categoria "leg-powered" il quarto miglior risultato maschile (136,49 km/h) e il secondo miglior risultato femminile (123,88 km/h).
Team leader: DANIELE BECCHERO
Referente: CHIARA GASTALDI
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team PoliTo H2Fly realizza un prototipo di catamarano a propulsione ibrida idrogeno-batterie, con cui partecipa alla Monaco Energy Boat Challenge, competizione internazionale dedicata allo sviluppo di powertrain a zero emissioni per il settore nautico. Il Team unisce studenti di diversi corsi di Ingegneria impegnati nello sviluppo di fuel-cell a idrogeno, nel progetto di pacchi batteria, nelle analisi strutturali (FEM) e idrodinamiche (CFD), oltre che in sensoristica e telemetria.
Team leader: MATTEO LOMBARDO
Referente: MAURO BONFANTI
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team POLITO IN LIGHT valorizza il patrimonio costruito attraverso la luce come strumento funzionale e artistico. Integrando Design, Architettura e Ingegneria, il progetto "Shaping Nightscape" esplora nuove visioni del paesaggio notturno universitario. Le attività spaziano dalla ricerca alla sperimentazione pratica con workshop e concept innovativi per migliorare identità, sicurezza e sostenibilità degli spazi dell'Ateneo.
Team leader: STEFANIA SCALERA
Referente: ANNA PELLEGRINO
Dipartimento: DIPARTIMENTO DI ARCHITETTURA E DESIGN
Il PoliTo Rocket Team è il team studentesco del Politecnico di Torino interamente dedicato alla progettazione e costruzione di razzomodelli, con l'obiettivo di competere annualmente contro gli altri team studenteschi europei di razzomodellismo a EuRoC. Lungo circa 2.25m e pesante meno di 8kg, Cavour è il primo razzo del team a propellente solido e porta il nome dell'omonimo padre fondatore dell'Italia.
Team leader: ANDREA PANTANO
Referente: ALFONSO PAGANI
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Polito Sailing Team è un gruppo di studenti universitari che si occupa dell'ideazione, della progettazione, della realizzazione e della conduzione di prototipi, sostenibili ed innovativi, di imbarcazioni a vela da competizione, appartenenti alle classi Skiff R3 e Moth, concepiti per la partecipazione a competizioni veliche internazionali. L'obiettivo del Team consiste nel creare un progetto che consenta agli studenti di accrescere le proprie competenze tecniche, relazionali e organizzative.
Team leader: FILIPPO PASQUI
Referente: GIULIANA MATTIAZZO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
PoliTOcean è un Team di oltre 70 studenti del Politecnico di Torino, guidato dal Prof. Claudio Sansoè, dedicato alla robotica subacquea e alla progettazione di ROV e AUV per la tutela dell'ambiente marino. Partecipa annualmente alla MATE ROV Competition negli USA. Ha un'area Ricerca e Sviluppo che collabora con aziende hi-tech. L'obiettivo è vincere la competizione e crescere oltre il Politecnico.
Team leader: CARLO STEFANO SECLI
Referente: CLAUDIO SANSOE'
Dipartimento: DIPARTIMENTO DI ELETTRONICA E TELECOMUNICAZIONI
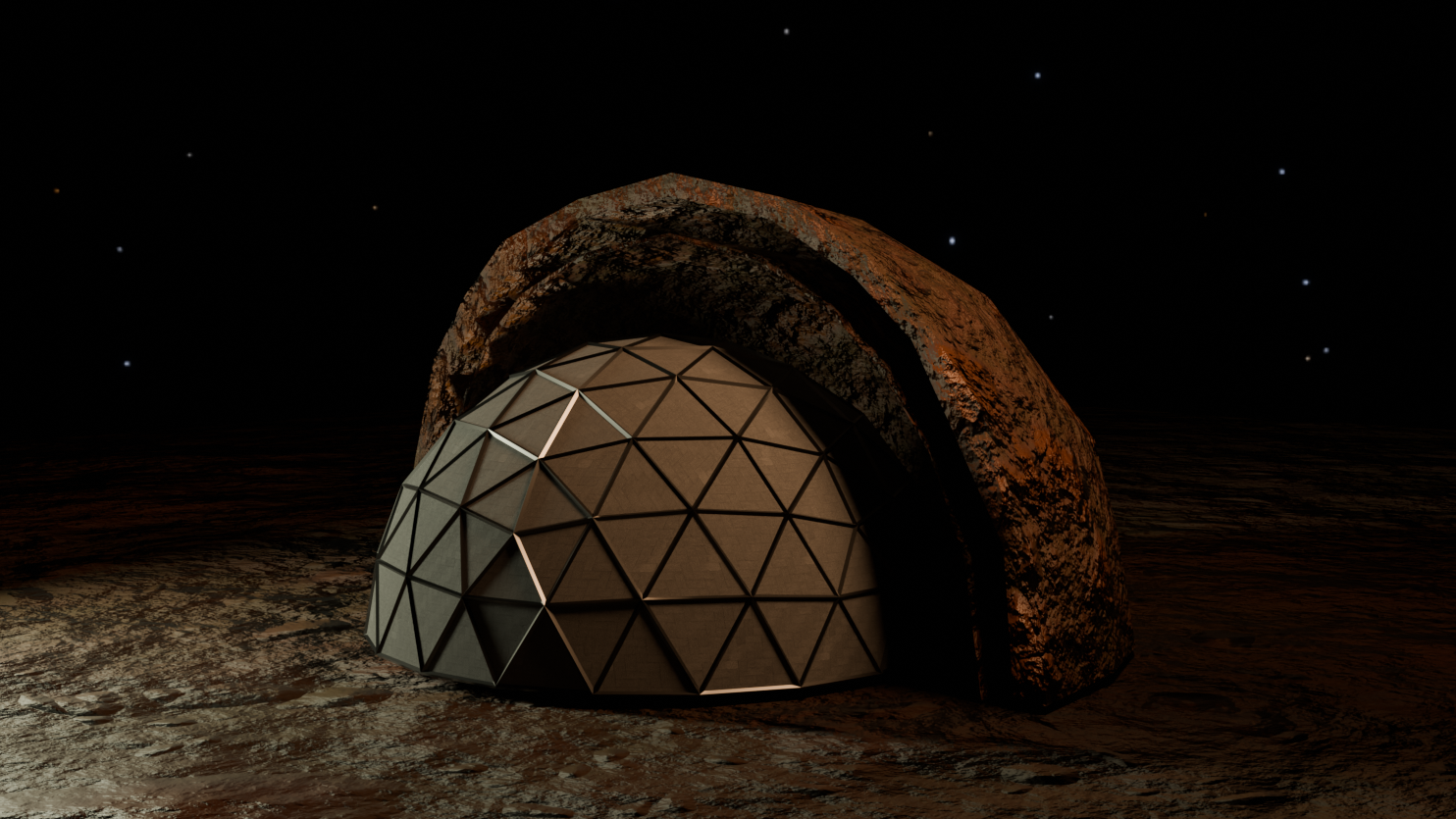
PoliToMars è un team multidisciplinare di studenti di ingegneria ed architettura. Il progetto nasce con l'idea di creare qualcosa di innovativo e stimolante, l'obiettivo è quello di progettare e definire, nella sua totalità, un modulo abitabile su Marte. Con lo scopo di sviluppare tutte le caratteristiche, non solo inerenti la struttura, ma anche la produzione di energia, di materiali e la gestione di processi costruttivi e di vivibilità che possano rendere il modulo completamente autonomo.
Team leader: GIORGIO BAROLO
Referente: VALERIO DE BIAGI
Dipartimento: DIPART. DI ING. STRUTTURALE, EDILE E GEOTECNICA
Siamo PoliTOrbital, un team di studenti che sviluppa il progetto preliminare di un velivolo suborbitale in grado di garantire l'accesso allo spazio e la sperimentazione della microgravità al maggior numero di passeggeri possibile nel rispetto degli standard ambientali. Ogni anno partecipiamo al Défi Aérospatial Etudiant, un concorso studentesco sponsorizzato dall'Agenzia spaziale europea ESA, ArianeGroup e Dassault Aviation.
Team leader: DELARAM DINIAN
Referente: ROBERTA FUSARO
Dipartimento: DIPART. DI ING. GESTIONALE E DELLA PRODUZIONE
Team Studentesco dedicato alle tematiche della Cybersecurity e dell'Ethical Hacking. Le principali attività del Team sono: la partecipazione a competizioni internazionali di tipo "Capture The Flag", la formazione interna mediante talks e presentazioni, l'organizzazione di eventi pubblici sulla sicurezza informatica (di carattere divulgativo e non) e la collaborazione con vari dipartimenti del Politecnico.
Team leader: ALESSANDRO PIZZORNI
Referente: CATALDO BASILE
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
Il Team QubiTO si occupa di calcolo quantistico dal punto di vista ingegneristico, algoritmico, matematico e applicativo. L'obiettivo è quello di approfondire e divulgare i più recenti sviluppi di questo campo innovativo, promuovendo il confronto con enti esterni e team di ricerca e partecipando a competizioni nazionali e internazionali. L'attenzione è rivolta allo sviluppo di soluzioni innovative a problemi del mondo reale in cui sia possibile ottenere un vantaggio quantistico.
Team leader: LEONARDO NICCOLAI
Referente: BARTOLOMEO MONTRUCCHIO
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
RoboTO è un Team Studentesco multidisciplinare che progetta, realizza e programma robot per competizioni internazionali come la RoboMaster University League e la Field Robotic Event. Unendo competenze di meccatronica, informatica, elettronica, meccanica e gestione, il team crea sistemi innovativi e affidabili con un approccio sperimentale e in continuo miglioramento.
Team leader: LETIZIA D'ANGELO
Referente: MARCELLO CHIABERGE
Dipartimento: DIPARTIMENTO DI ELETTRONICA E TELECOMUNICAZIONI
Il gruppo nasce nel 2020 a partire dall'idea di alcuni studenti di radunare tutti gli appassionati di scacchi dell'ateneo, di ogni livello! Il Progetto si pone l'obiettivo di sviluppare attraverso il gioco soft skill fondamentali per la figura dell'ingegnere tra cui problem solving, pianificazione, astrazione. Vengono dunque organizzati tornei, proposte lezioni e sfide sempre nuove e interessanti per permettere un accrescimento costante! Telegram: @ScacchiPoliTO & Instagram: @scacchi_polito
Team leader: MANUEL MACIS
Referente: GIOVANNI SQUILLERO
Dipartimento: DIPARTIMENTO DI AUTOMATICA E INFORMATICA
SemiTO-V è un Team Studentesco RISC-V presso il Politecnico di Torino (DET) che utilizza l'ISA RISC-V, uno standard aperto, per creare processori personalizzati, firmware e software, oltre a progettare schede PCB (sia per i processori del Team che per quelli già prodotti), rendendo tutto disponibile in open source. Si stanno progressivamente approfondendo diversi ambiti, dall'analisi dei circuiti all'architettura dei processori, passando per la progettazione RTL e lo sviluppo di software di basso livello per l'ISA RISC-V (RV32 e RV64).
Team leader: EMANUELE DE PAOLI
Referente: CLAUDIO PASSERONE
Dipartimento: DIPARTIMENTO DI ELETTRONICA E TELECOMUNICAZIONI
Il team nasce con l'obiettivo di progettare e realizzare piccole strutture modulari a servizio di operatori e professionisti che lavorano in alta montagna. Le attività di monitoraggio e ricerca necessitano di strutture in quota, per accogliere la strumentazione ed il personale, che richiede uno spazio abitativo temporaneo. L'obiettivo è sviluppare competenze progettuali dalle condizioni del contesto alpino, confrontandosi con la sostenibilità degli interventi e il rapporto con la montagna.
Team leader: ANDREA VERNETTI ROSINA
Referente: ROBERTO DINI
Dipartimento: DIPARTIMENTO DI ARCHITETTURA E DESIGN
Il team Smart Green è un gruppo di studenti dedicato allo sviluppo di soluzioni innovative nel campo dell'agricoltura 4.0, con particolare attenzione alla digitalizzazione e all'automazione dei processi agricoli. Il nostro obiettivo principale è creare tecnologie avanzate che migliorino l'efficienza e la sostenibilità del settore agricolo. Uno dei nostri progetti di punta è lo sviluppo di camere di coltivazione automatizzate fuori suolo, che consentono la crescita di ortaggi in ambienti completamente autonomi e controllati. Questi sistemi ottimizzano l'uso delle risorse e riducono al minimo l'impatto ambientale. Il team è coinvolto in ogni fase dello sviluppo, dalla progettazione della struttura e dei sistemi di irrigazione e illuminazione, all'integrazione dell'elettronica per la raccolta dei dati e il monitoraggio in tempo reale delle condizioni di crescita delle piante. Combinando ingegneria, elettronica e competenze agricole, Smart Green contribuisce attivamente a plasmare il futuro dell'agricoltura sostenibile.
Team leader: LUCA GHIOTTO
Referente: PAOLO CHIABERT
Dipartimento: DIPART. DI ING. GESTIONALE E DELLA PRODUZIONE
Il Team cura la progettazione, costruzione e prova di carico di ponti realizzati con pasta e colla, seguendo regole costruttive ampiamente condivise, a livello internazionale, da molti altri Atenei. La competizione annuale "Spaghetti Bridge", principalmente rivolta agli studenti del Politecnico, ma aperta anche a studenti di altri Atenei, riguarda la costruzione di un ponte di un metro di luce. A fronte di risultati significativi, per i vincitori vi sarà la possibilità di partecipare a competizioni internazionali. Nell'ambito delle attività di orientamento con le scuole medie superiori, il Team organizza anche competizioni "MIDI Spaghetti Bridge" con ponti di mezzo metro di luce, con l'obiettivo di focalizzare l'attenzione degli studenti su aspetti specifici dell'ingegneria civile. Il Team cura anche manifestazioni "MINI Spaghetti Bridge" rivolte specificamente ai ragazzi delle scuole elementari e medie. Per questa competizione (già organizzata con notevole successo nell'ambito degli eventi Bimbi al Poli e Salone del Libro) la colla viene sostituita con la plastilina
Team leader: FEDERICO SILVESTRI
Referente: GIORGIO ZAVARISE
Dipartimento: DIPART. DI ING. STRUTTURALE, EDILE E GEOTECNICA
Il progetto nasce nel 2004 ed è uno dei team storici del Politecnico. Nel corso degli anni, il team ha sviluppato diverse vetture da corsa tipo Formula: inizialmente a combustione interna, poi ibride, e attualmente elettriche, acquisendo un know-how avanzato in ambito di sviluppo e ricerca. Attualmente è composto da 80 membri che si occupano di progettare, simulare e testare ogni parte della vettura, con l'obiettivo di partecipare annualmente a competizioni di livello mondiale organizzate dalla Society of Automotive Engineers (SAE). La competizione valuta la qualità della progettazione e l'efficienza ingegneristica della monoposto attraverso una serie di prove statiche e dinamiche. La vettura è dotata di un pacchetto aerodinamico completo, testato in galleria del vento, di una monoscocca in fibra di carbonio interamente realizzata dal team, di quattro motori elettrici in-wheel e di un'elettronica progettata completamente all'interno del gruppo.
Team leader: LORENZO CAMBURSANO
Referente: ANDREA TONOLI
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team STUDIO IREOS (ex VERTIGO LAB) è composto da studenti accomunati dal voler applicare le competenze universitarie in maniera pratica nel settore audiovisivo. Ciò per crescere e far emergere in questo settore la considerazione delle eccellenze di Ing. del Cinema e dei Mezzi di Comunicazione e del Politecnico stesso. I membri, dopo essersi conosciuti su precedenti progetti filmici, si costituiscono in team nel 2018 e decidono come primo progetto di portare avanti la produzione di un documenti.
Team leader: IRENE PRENCIPE
Referente: TATIANA MAZALI
Dipartimento: DIP. INTERAT. DI SCIENZE, PROG. E P. DEL TERRIT
Il Team Studentesco MeshLink progetta e realizza soluzioni di comunicazione wireless Open Source (LoRa/Meshtastic) per aumentare la sicurezza in aree off-grid, sviluppa dispositivi innovativi come colonnine SOS per sentieri escursionistici e sistemi di localizzazione per veicoli. Il Team unisce la passione per le telecomunicazioni a un'esperienza pratica di progettazione hardware e software, trasformando la conoscenza in soluzioni a impatto reale.
Team leader: AGNESE PONZANO
Referente: DANIELE TRINCHERO
Dipartimento: DIPARTIMENTO DI ELETTRONICA E TELECOMUNICAZIONI
PoliTeK Music è un Team studentesco del Politecnico di Torino (DET) dedicato allo sviluppo di strumenti e tecnologie audio innovativi. Il team crea un ambiente dove idee diventano progetti, promuovendo collaborazione e creatività. Condividendo i risultati in una prospettiva open-source, il team punta a unire musicisti, ingegneri, designer e appassionati, esplorando nuove soluzioni e portando la musica oltre i suoi limiti.
Team leader: ANGELO TEDESCO
Referente: PAOLO BARDELLA
Dipartimento: DIPARTIMENTO DI ELETTRONICA E TELECOMUNICAZIONI
Il Team S 55 nasce ispirandosi al leggendario Savoia-Marchetti S55X, icona dell'aviazione italiana e simbolo di innovazione. Con la stessa visione pionieristica, il gruppo di ricerca sviluppa prototipi che coniugano sostenibilità, ricerca scientifica e tecnologie avanzate. Nel 2024 è stato realizzato il primo volo puramente elettrico di S55-02. Attualmente è in fase di sviluppo HERA, destinato a diventare il primo idrovolante a idrogeno al mondo, tracciando una rotta verso un futuro più verde.
E-mail: teams55.polito@gmail.com
Team leader: ANOUAR LABIOUI
Referente: ENRICO CESTINO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Il Team propone un percorso volto a fornire a ciascun membro le competenze espressive e progettuali richieste per portare in scena uno spettacolo teatrale. Gli studenti hanno così l'opportunità di approfondire una passione personale accompagnati da esperti del settore, e inoltre formare un gruppo eterogeneo che valorizzi le dinamiche di gruppo e l'apprendimento collaborativo, concretizzando una multidisciplinarietà tra progettazione ed arti performative e rappresentative.
Team leader: FRANCESCA SALVAIA
Referente: CRISTIAN CAMPAGNARO
Dipartimento: DIPARTIMENTO DI ARCHITETTURA E DESIGN
TOC2 opera nell'ambito dell'architettura e urbanistica partecipativa, con focus sul commoning in contesti rurali e marginali. Promuove rigenerazione dal basso con pratiche collaborative, autocostruzione sostenibile e innovazione didattica. Mira a rivitalizzare il campus Valentino, attivando sinergie con realtà territoriali per formare progettisti consapevoli e comunità studentesche inclusive.
Team leader: MICHELE TRUCCO
Dipartimento: DIP. INTERAT. DI SCIENZE, PROG. E P. DEL TERRIT
WEEE Open è il Team Studentesco del Politecnico di Torino dedicato al recupero e alla riparazione di computer dismessi, per ridurre i rifiuti elettronici e donarli a scuole, enti e associazioni. Accanto a questa attività sviluppa progetti open source, prototipi elettronici e iniziative di riuso creativo, promuovendo formazione, sostenibilità e collaborazione con altri team nell'ambito dello Student Sustainability Hub e dell'Agenda 2030.
Team leader: FABRIZIO BRUTTI
Referente: DEBORA FINO
Dipartimento: DIPARTIMENTO SCIENZA APPLICATA E TECNOLOGIA
ZEFIRO Urban Air Mobility Team del Politecnico di Torino progetta e realizza velivoli a decollo e atterraggio verticale a pilotaggio remoto per la Vertical Flight Society Design & Build Competition. Vincitore del Best New Entry Award 2025 nella VFS Design Competition, il team porta avanti la ricerca sulla propulsione intubata e distribuita e promuove una mobilità aerea urbana sostenibile, creando sinergie tra studenti, industria e ricerca.
Team leader: SIMONE VELLA
Referente: ANGELO LERRO
Dipartimento: DIPARTIMENTO DI ING. MECCANICA E AEROSPAZIALE
Materiale informativo
- Regolamento per il riconoscimento dei Team Studenteschi e per il finanziamento di progetti dei Team Studenteschi del Politecnico di Torino - in vigore da 21/07/2025
- Linee guida per la gestione dei Team Studenteschi del Politecnico di Torino - in vigore dal 21/07/2025
- Regolamento per il riconoscimento dei Team Studenteschi e per il finanziamento di progetti dei Team Studenteschi del Politecnico di Torino - in vigore dal 20/02/2024 fino al 20/07/2025
- Regole operative per il riconoscimento di attività e il funzionamento di progetti dei Team e delle Associazioni Studentesche del Politecnico di Torino- valido dal 08/03/2024 fino al 20/07/2025
- Linee guida per la comunicazione degli eventi organizzati dai team e dalle associazioni studentesche iscritte all’albo del Politecnico di Torino