Robot non per gioco

Non giocano ma sperimentano. Provano materiali, tecnologie, soluzioni e organizzazioni in grado di creare macchine (robot), autonome o semiautonome, capaci di svolgere compiti diversi con grande precisione e in ambienti sconosciuti al servizio della società e delle imprese. È il lavoro dei componenti di RoboTO, uno dei team studenteschi del Politecnico, uno degli ultimi nati (nel 2019) che, tuttavia, ha già fatto molta strada.
“La nostra squadra – spiega Francesco Paoli Leonardi, studente del Corso di Laurea Magistrale in Ingegneria Informatica (Computer Engineering) e team leader di RoboTO -, è stata creata per prendere parte a RoboMaster University, una competizione rivolta agli studenti universitari di tutto il mondo che ha l’obiettivo, attraverso una serie di prove, di validare il lavoro di progettazione e costruzione di robot. Si tratta però di qualcosa che non ha semplicemente lo scopo di costruire un robot per vincere una gara, ma molto di più”.
Istruire giovani ingegneri alla robotica vista in tutti i suoi aspetti, ma anche al lavoro squadra e per obiettivi, sono i veri traguardi che RoboTO si prefigge di raggiungere. Leonardi precisa: “Chi fa parte di RoboTO ha occasione di applicare tutte le branche dell’ingegneria, capire come si lavora in gruppo, sperimentare un’organizzazione che è davvero aziendale e quindi con una certa gerarchia, compiti precisi, traguardi da raggiungere”.

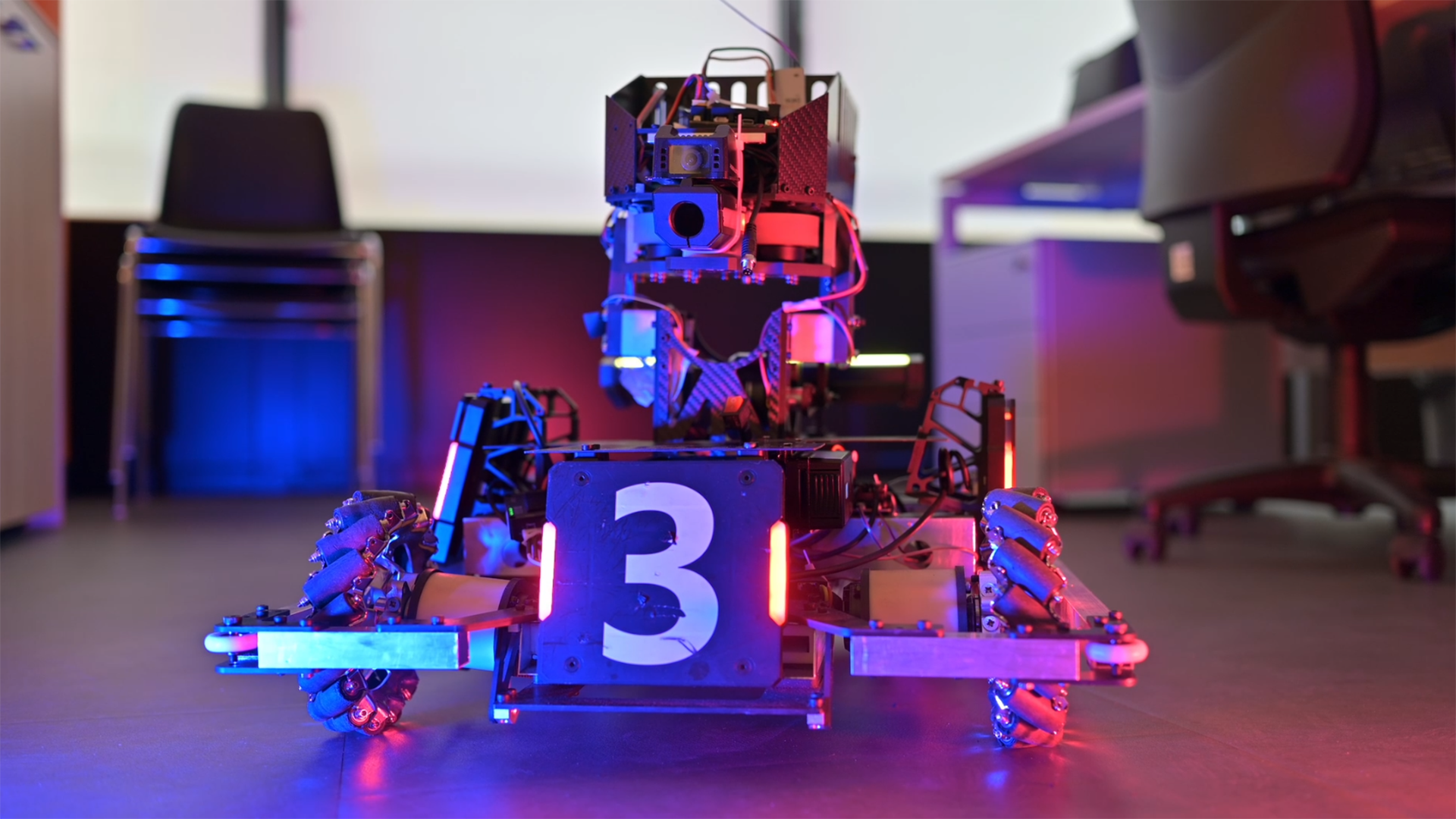
Certo, il primo obiettivo da conquistare è il traguardo di RoboMaster University League: un esperimento in forma di competizione. Ad essere messi alla prova, sono infatti robot che derivano da progetti originali, basati su materiali e tecnologie avanzate e portate ai limiti estremi d’uso. Per partecipare a RoboMaster University servono almeno 3 robot che competono con i loro omologhi di altre università in due tipi di prove: 1 contro 1 e 3 contro 3. “Si tratta – dice ancora Leonardi – di rover, cioè robot mobili a quattro oppure a due ruote, semiautonomi oppure autonomi (in questi casi viene fatto uso dell’intelligenza artificiale), che si confrontano sulla base di determinate caratteristiche come la precisione, l’efficienza energetica, la capacità di spostamento, la manovrabilità”. Ogni robot è identificato da un nome: Balancing robot quando a due ruote auto-bilanciato, Standard robot se a quattro ruote capace di muoversi in tutte le direzioni del piano, Sentry robot sempre a quattro ruote ma totalmente autonomo.
La gara consiste nel cercare di ridurre all’inattività i robot avversari con il lancio di “proiettili” di plastica che colpiscono dei sensori. Ma soprattutto, vince chi riesce a costruire la macchina più efficiente e migliore dal punto di vista dell’affidabilità.
Marcello Chiaberge, professore associato al Dipartimento di Elettronica e Telecomunicazioni-DET e referente scientifico di RoboTO aggiunge: “All’interno del nostro team i giovani si formano sulla base di regole precise, partecipando a una competizione imparano cosa significa realmente lavorare per obiettivi e in gruppo”. Poi precisa: “La nostra attività di ricerca sui robot dimostra la loro utilità d’uso in applicazioni che necessitano di grande precisione e che devono essere svolte in condizioni estreme. Basta pensare al monitoraggio del territorio ma anche a particolari processi industriali che con i robot possono essere tenuti sotto controllo anche in ambienti sconosciuti, complessi e a rischio”.
Tutto con una forte attenzione ai materiali utilizzati e quindi alle loro caratteristiche di densità, resistenza e peso. “Ultimamente – dice ancora Leonardi -, abbiamo utilizzato la fibra di carbonio e l’alluminio ma ci siamo rivolti anche alla stampa 3D sulla quale, per esempio, avremmo molto bisogno di partner aziendali”. Un’attività che, recentemente si è rivolta anche al riuso dei robot dismessi che possono comunque essere usati per attività collegate alla mobilità autonoma.
“Il nostro compito – sottolinea Leonardi -, non è quello di costruire giocattoli, ma macchine capaci di svolgere, in modo autonomo oppure semiautonomo, compiti anche complessi in ambienti che possono essere ogni volta diversi tra di loro. Ci formiamo con una visione completa del processo costruttivo: dal progetto al prodotto finito. Chi lavora con noi ha in mano le competenze per realizzare qualunque robot industriale sia necessario”.