
Robotica di servizio: due giovani ricercatori del DIMEAS premiati alla conferenza Jc-IFToMM di Tokyo
Dai dispositivi per la riabilitazione ai robot capaci di "sentire" gli oggetti: la robotica di servizio sviluppata al Politecnico di Torino continua a evolversi e conquista un importante riconoscimento internazionale. Giovanni Colucci e Simone Duretto del Dipartimento di Ingegneria Meccanica e Aerospaziale-DIMEAS, entrambi appartenenti al gruppo di ricerca del professor Giuseppe Quaglia, sono stati selezionati tra i finalisti del Young Investigator Fund Best Paper Award durante la nona edizione del Jc-IFToMM International Symposium, svoltasi presso la Waseda University di Tokyo il 12 e 13 giugno.
Il convegno rappresenta l’appuntamento annuale della comunità giapponese appartenente alla International Federation for the Promotion of Mechanism and Machine Science (IFToMM) e riunisce ricercatrici e ricercatori attivi nei settori della Scienza dei meccanismi, della Robotica, della Tribologia e della Dinamica delle macchine.
Nel corso del convegno, i due ricercatori hanno presentato due contributi scientifici che illustrano i più recenti risultati delle rispettive attività di ricerca, entrambe focalizzate sulla progettazione e sulla prototipazione di sistemi pneumatici per applicazioni di robotica di servizio.
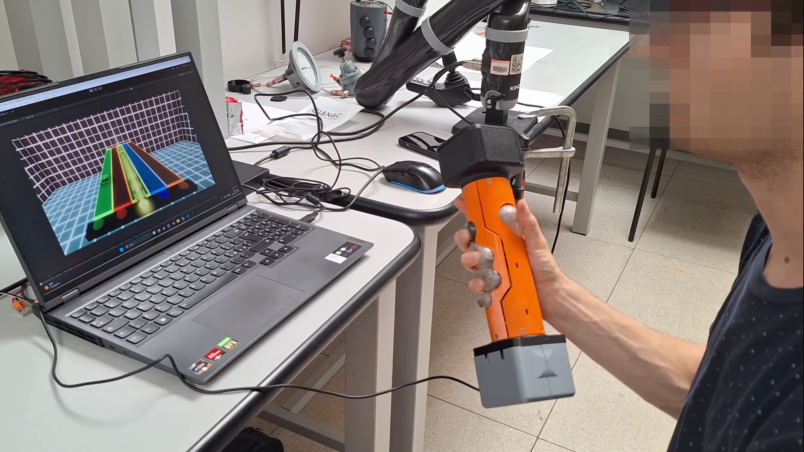
Nel dettaglio, Giovanni Colucci ha presentato PAL-HAND.Q, cioè un dispositivo aptico, cioè un dispositivo in grado di fornire un feedback tattile durante l'interazione uomo-macchina, progettato per supportare l'esercizio fisico e la riabilitazione attiva delle dita. Grazie ai bassi consumi energetici e all'elevata compattezza, il sistema si presta all'impiego in programmi di tele-riabilitazione, consentendo ai terapisti di monitorare da remoto gli esercizi svolti e di raccogliere dati utili a valutarne l'andamento.
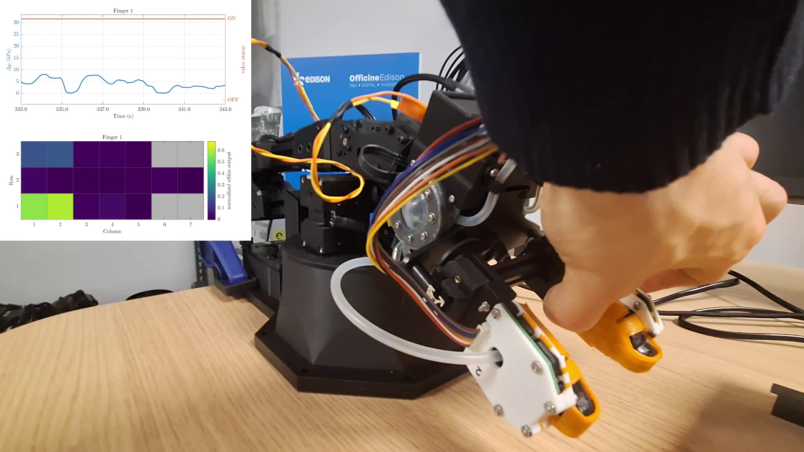
Simone Duretto ha, invece, presentato PneuTact.Q, un sistema di percezione tattile integrabile su manipolatori robotici commerciali, capace di rilevare informazioni sulla presa, come la superficie di contatto e la forza applicata. Questi dati permettono al robot di adattare le proprie strategie di controllo e di manipolare gli oggetti in modo più preciso ed efficace. Anche questo sistema si distingue per il basso consumo energetico e può essere installato sull'organo terminale del robot senza ridurne significativamente la capacità di carico (payload).


- Immagine
 NomeGiovanni Colucci
NomeGiovanni Colucci - Immagine
 NomeSimone Duretto
NomeSimone Duretto

